Auf dem Gelände der Weißenseer Straße 77-79 wurde am 08.06.2021 ein Versuch zur Messung des Wasserstands auf einer überfluteten Fläche mittels an einem Bus befestigter Sensorik durchgeführt. Geplant wurde der Versuch von der BVG in Zusammenarbeit mit den BWB und SCS. Die für die Durchführung beauftragte Firma ISW GmbH aus Magdeburg hat den Versuch in Abstimmung vorbereitet und durchgeführt. Obwohl in der Ausschreibung lediglich die Überflutung als Leistung abgefragt wurde, hat die Firma ebenfalls das Messkonzept, die Messdatenaufnahme und die Detailplanung des Versuchs geleistet und damit das Experiment zum Erfolg geführt.
Vorbereitung und Aufbau
In Vorbereitung wurde das Gelände durch den Geodatenservice der BWB für den späteren Vergleich mit den gemessenen Daten mittels LiDar Scan detailliert vermessen. Bei einem ersten vor Ort Termin mit der Firma ISW wurde die Fahrstrecke des Busses festgelegt und einzelne Punkte auf der Strecke nachgemessen, um den Wasserbedarf für eine ausreichende Überflutungshöhe von ca. 15 cm zu schätzen.
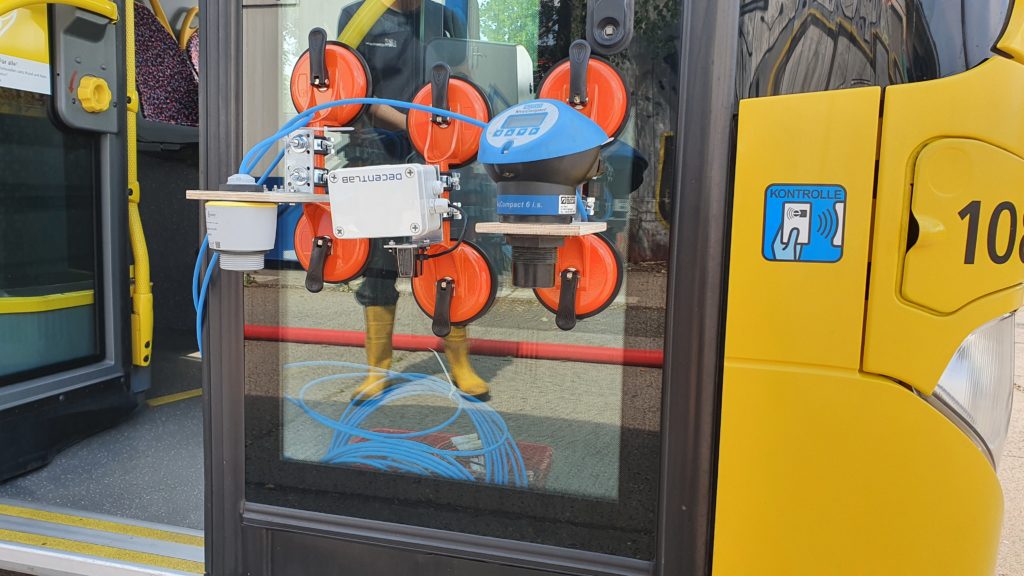
Datenlogger und Material zur Befestigung der Sensoren am Fahrzeug wurden von ISW besorgt und getestet (siehe Abbildungen 1 und 2). Mit drei verschiedenen berührungslosen Sensoren soll der Abstand zum Boden während der Fahrt durch die überflutete Fläche gemessen werden. Ziel war es Abstandssensoren am Fahrzeug allgemein und die Ergebnisse unterschiedlicher Sensoren im Speziellen zu testen und vergleichen.


Durchführung
Eine Fläche von etwa 100 m^2 wird für den Versuch überflutet. Damit das Wasser nicht abläuft, wurden 2 Straßenabläufe abgesperrt und am Ende der Fahrstrecke ein kleiner Wall von ca 5 cm mit Schnellbeton errichtet. An der niedrigsten Stelle konnte so ein Wasserstand von 18,6 cm erreicht werden.

Für die Bewertung, ob die gemessenen Werte ausreichend genau sind, wurden an zwei Positionen eine Drucksonde fixiert, die kontinuierlich viermal pro Sekunde einen Wasserstandswert aufgenommen haben (Abbildung 4).

In Abbildung 5 sind sind von rechts nach links eine Ultraschallsonde der Firma nivus, ein Laser Distanzmesser der Firma Garmin angebracht an ein LoRaWAN Übertragungsmodul der Firma Decentlab und eine Radarsonde der Firma Vega zu sehen. Die Radar- und Ultraschallsonde messen jeweils vier mal pro Sekunde und sind direkt an einen Logger angeschlossen, der diese ebenfalls mit Energie versorgt. Der Laser wird über die Batterie des LoRaWAN Übertragungsmoduls gespeist und sendet alle sechs bis 10 Sekunden einen Wert.
Bei insgesamt 11 Messfahrten mit moderater Geschwindigkeit, 5 Kontrollfahrten bei langsamer Geschwindigkeit und 3 Fahrten bei trockener Fahrbahn konnte eine gute Datenmenge aufgenommern werden. Weitere Messungen im Stand ließen auf systematische Abweichungen der Sensoren zueinander rückschließen, die aber mit Hilfe der Konfiguration erklärbar sind.

Ergebnisse und Auswertung
Um die einzelnen Fahrten zeitlich zuzuordnen, als auch quantitativ vergleichen zu können, wurden die Messungen der Drucksonden herangezogen. Beide Drucksonden konnten die Prozesse gut erfassen. Für den Datenvergleich wird im Folgenden hauptsächlich die Sonde im Straßenablaufschacht verwendet. Gut zu erkennen ist der steile Anstieg bei Durchfahrt durch den tiefsten Bereich im Gelände bei der Fahrt über die überflutete Fläche. Der starke Ausschlag der Drucksonde, welche direkt überfahren wird zeigt exakt das Erreichen der Räder der Vorderachse des Busses an. Bei den langsamen Fahrten ist bei Überfahrt der hinteren Achse ebenfalls ein Signal erkennbar. Anhand dieses Signals können die Daten der Messreihe den einzelnen Fahrten eindeutig zugeordnet werden.
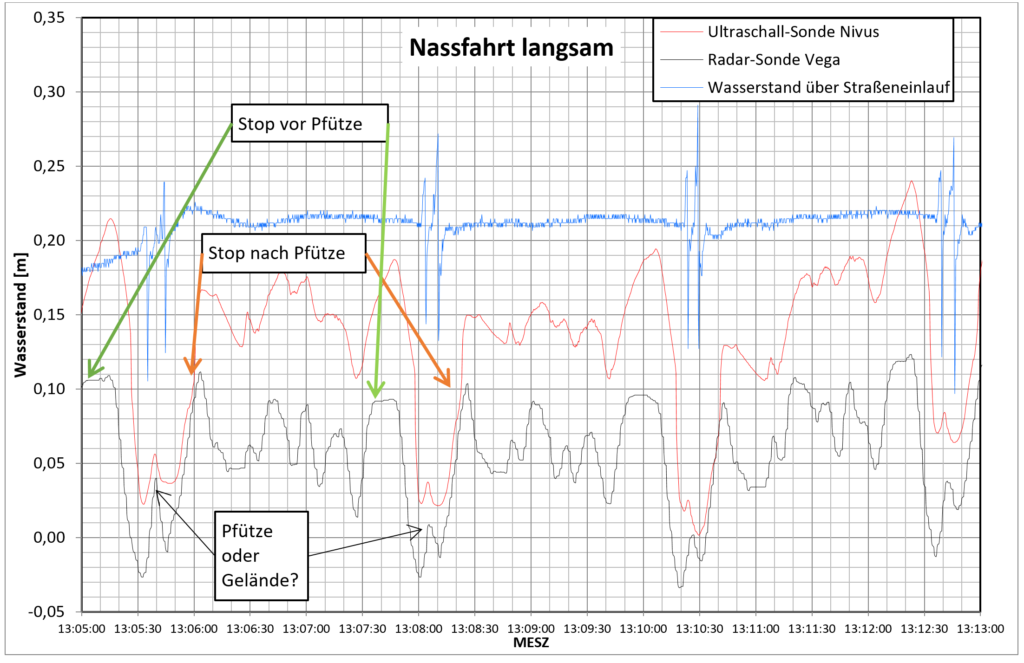
In der Auswertung der einzelnen Fahrten ist ein eindeutiges Muster erkennbar. In Graph 1 ist eine Fahrt mit langsamer Geschwindigkeit exemplarisch dargestellt. Zu Beginn befindet sich der Bus in Warteposition an der Anfahrtsstelle. Bei der Anfahrt selbst hebt sich der vordere Busteil leicht an, was im Graphen über eine kleine Spitze direkt nach der Ruhephase erkennbar wird (Radar-Datenreihe). Anschließend sinkt die Abstandsanzeige stark ab und steigt anschließend wieder an, um selbigen Ausschlag zu wiederholen. Nach einem kurzen Stop fährt der Bus um den Platz herum wieder zurück zur Anfahrtstelle.
Die Messsignale sind zwar bei den einzelnen Durchläufen konsistent, in der Interpretation aber nicht eindeutig nachvollziehbar. Das zeigt, dass die Versuche selbst ausreichend präzise durchgeführt wurden. Die systematischen Differenzen der Messwerte zu den Annahmen lassen sich über mehrere Punkte begründen.
Allem voran hat die interne Dämpfungskorrektur der Sensoren wahrscheinlich für die erkennbare Latenz bei der Aufnahme der Messwerte gesorgt. Die Vibrationen, die bei der Fahrt entstehen wirken sich ebenfalls stark auf die Messgenauigkeit aus. Weitere Umweltfaktoren, wie Temperatur, wirken sich auf die Messwerte aus. Es ist zudem davon auszugehen, dass zum einen die Bewegung des Busses, die unterschiedlichen Messmedien und die Einstellungen der Messgeräte einen starken Einfluss auf die Messung haben. Sowohl qualitativ, als auch quantitativ konnte keiner der Sensoren die überflutete Fläche während der Fahrt abbilden. Offensichtlich existieren zu viele unbekannte oder nicht quantifizierbare Einflussfaktoren auf die Messungen.
Nichtsdestotrotz war das Experiment ein spannender Pilotversuch, um Erfahrungen zu den Anforderungen mobiler Wasserstandsmessung zu gewinnen. Da die Bilderkennung in dem Bereich noch nicht gut genug ist und die getesteten Abstandssensoren wohl nicht für eine Messung unter diesen Umständen geeignet sind, werden wir vorerst die mobile Wasserstandserfassung vorerst nicht weiter verfolgen. Andere Methoden hingegen bleiben interessant, wie die Statusmeldung der Busfahrer und Busfahrerinnen.